
 返回列表
返回列表
哈尔滨工业大学计算学部刘贤明教授团队近日在具身智能领域取得重要进展,提出了一种基于隐式神经网络的6D物体 位姿优化方法,显著提升了物体定位的精度与效率。相关研究成果以《Fast and Accurate 6D Object Pose Refinement via Implicit Surface Optimization》为题,发表于机器人领域国际顶级期刊《IEEE Transactions on Robotics》。
6D位姿估计(包含3D旋转和3D平移)是机器人操控、3D场景理解、增强现实等应用的核心技术步骤。传统方法依赖迭代最近点ICP(Iterative Closest Point)算法进行位姿优化,但ICP需要显式建立点云与3D模型的一一对应关系,易陷入局部最优且对噪声和遮挡敏感。研究团队提出了一种基于隐式神经网络的优化框架,通过将目标物体的3D模型编码为符号距离场(SDF),直接优化点云与模型表面的距离,无需显式匹配对应点。该方法具有以下优势:1)高效性:离线训练仅需4-5分钟,在线优化实时完成。2)鲁棒性:对初始位姿偏差大、噪声、尺度变化及遮挡等复杂场景表现优异。 3)通用性:可无缝集成至现有位姿估计流程,无需额外标注数据。
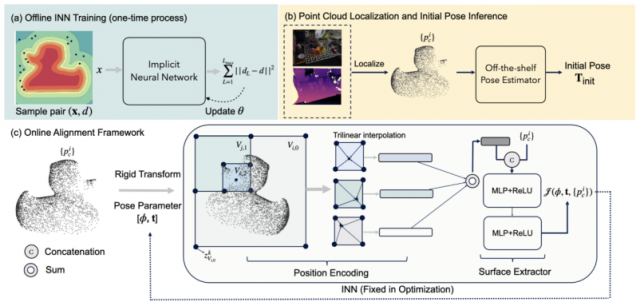
图1 系统框图
研究团队在合成与真实数据集(如LINEMOD、YCB-V、T-LESS)上进行了广泛测试。实验表明,该方法在ADD(-S)和VSD等指标上显著优于传统ICP及其变体。例如,在遮挡严重的Occluded LINEMOD数据集上,结合通用位姿估计器OVE6D,准确率从55.3%提升至71.5%。该技术可广泛应用于工业机器人精准抓取、自动驾驶环境感知、AR/VR交互等领域。团队已开源代码:https://github.com/pangbo1997/SDFR。
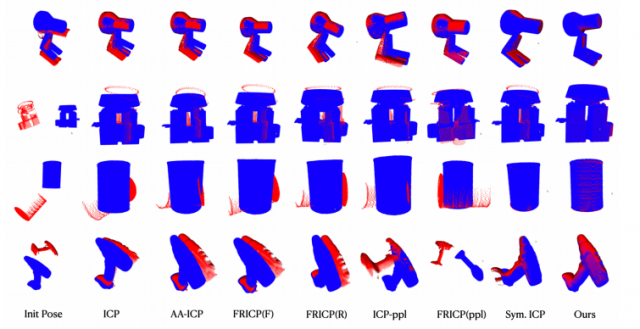
图2 合成数据集上的实验,方法在不同初始位姿误差下的修正结果
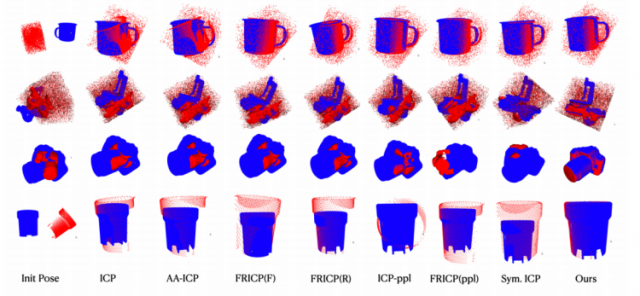
图3 合成数据集上的实验,方法在噪声与尺度差异下的修正结果

图4 真实数据集上的实验,方法在大初始位姿误差,噪声与尺度差异下的结果
哈工大为论文第一作者与通讯作者单位。论文通讯作者为计算学部刘贤明教授,第一作者为刘贤明教授指导的博士生庞博。研究工作受到国家自然科学基金重大研究计划、青年学生基础研究等项目资助。
论文链接:https://ieeexplore.ieee.org/document/10970084
期刊介绍
IEEE Transactions on Robotics (简称T-RO),由IEEE机器人和自动化组(RAS)主办,是机器人学科领域最高水平、最有影响力的国际顶级期刊之一。T-RO专注于发表机器人学领域的高质量原创研究,涵盖理论、设计、算法、系统及应用等多个方向,具有极高的专业评审门槛和接收标准。

